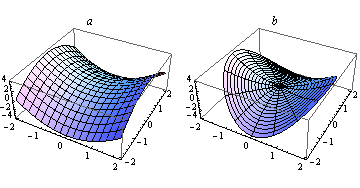
Something we frequently do in mathematics and its applications is to transform among different coordinate systems. For example, the surface in Figure 1a can be represented by the Cartesian equation
However, the same surface can also be represented in polar coordinates \left(r,\,\theta \right), by the equation
(see Figure 1b).
Figure 1: (a) the surface z=x^{2}-y^{2} in Cartesian coordinates and (b) the equivalent surface z=r^{2}\cos \,2\theta in polar coordinates
In this set of circumstances, we can think about the behaviour of z as x and y vary, or about its behaviour as r and \theta vary. It follows that the partial derivatives
exist, and so do the partial derivatives
What concerns us here is how these two sets of partial derivatives are related.
The answer comes from Taylor's theorem. Consider the surface
Suppose that we change the value of the variable r by \delta r, while holding \theta constant. In doing so, we will have to change the values of both x and y: let us say that these variables change by \delta x and \delta y respectively. Then the change in z will be equal to
But, by Taylor's theorem,
and therefore
In the limit as \delta x and \delta y tend to zero,
Similarly,
Together, these form the chain rule for partial differentiation.
The observation that
is in itself very useful: it enables us to deduce the error in z if we know the errors in x and y. For example, consider the cylinder with radius r m and height h m. It has surface area
Now, suppose we know r and h to within 5% and 1% respectively, and suppose both are measured at 3 metres. Then the error in A is given by
Thus
The relative error, as a percentage, is thus